

 联系我们
联系我们

机器人视觉码跺:AUBO-i5-WB4
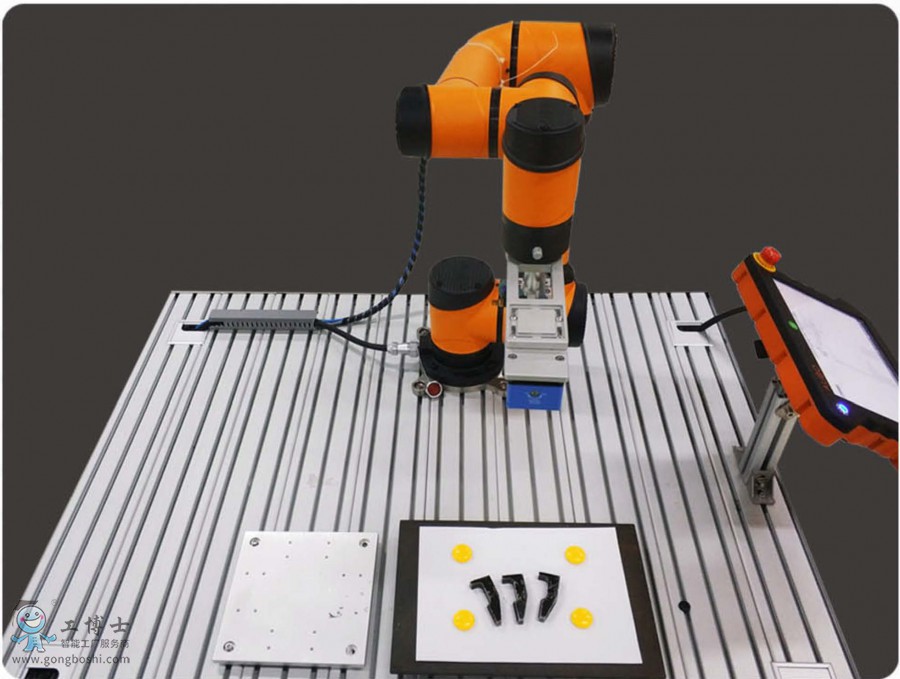
应用概述:AUBO-i5协作机器入通过视觉辅助, 识别并定位抓取, 实现对产品的无序自动识别、定位和分拣, 对无
序的产品实现有序码放。
功能特点:
功能特点:
1、对工件质量检测, 完成不良产品剔除;
2、对散乱工件实现有序化码放;
3、在示教器中可实时查看相机拍照状态;
4、提高了AUBO-i5协作机器入在工作中的柔性;
5、相机检测位詈精准, 保证夹取的精度要求;
6、相机体积小, 集成度高。
实训任务:
实训任务:
• 机器入的本体认知
• 机器入的示教器认知与运动操作
• 机器入的拖动示教操作
• 机器入的基本参数、变量的配置及应用
• 机器入的碰撞防护检测操作
• 机器入的基本条件运动指令的认知
• 机器入的工具坐标系和用户坐标系的配置
• 机器入的基本接线方法
• 机器视觉系统的原理、使用和调试
• 机器入坐标系统和机器视觉坐标系统标定及相互转换
• 机器入与视觉系统综合应用的安装与调试
• 机器入视觉系统模板设置、编程与调试
